






Hírek

Az autóipar élen jár a technológiai fejlesztési versenyben, a jövőben minden bizonnyal már emberi beavatkozás nélkül jutnak el A-ból B-be a gépjárműveink. Hol tartunk most, mikor léphetünk szintet, és miért nem önvezető az autó akkor sem, ha magától gyorsít és fordul?
Amióta a múlt század hajnalán a saját erőből mozgó kerekes közúti járművek megtették első métereiket, rengeteget változtak az autók. Kis túlzással a funkció – azaz az emberek és egyéb dolgaik szállítása – maradt az egyetlen, ami nem módosult a kezdetek óta.
Sokáig úgy tűnt, hogy az autó fix tulajdonságai között szerepel az is, hogy valakinek vezetnie kell azt, az elmúlt évek fejlesztései azonban egyértelműen abba az irányba mutatnak, hogy ez el fog tűnni, vagy legalábbis visszaszorul majd a jövő autóiban.
A vezetéstámogató és egyéb, vezetést segítő rendszerek egyre több feladatot vesznek ki kezeinkből, illetve megkönnyítik azok elvégzését. Okosodnak járműveink, de mi az a pont, ahol tényleg kijelenthetjük, hogy az autó önvezető?
Sokáig úgy tűnt, hogy az autó fix tulajdonságai között szerepel az is, hogy valakinek vezetnie kell azt, az elmúlt évek fejlesztései azonban egyértelműen abba az irányba mutatnak, hogy ez el fog tűnni, vagy legalábbis visszaszorul majd a jövő autóiban.
A vezetéstámogató és egyéb, vezetést segítő rendszerek egyre több feladatot vesznek ki kezeinkből, illetve megkönnyítik azok elvégzését. Okosodnak járműveink, de mi az a pont, ahol tényleg kijelenthetjük, hogy az autó önvezető?
A hangzatos szavak és funkcióelnevezések tengerében abszolút nem hibáztatható a vásárló, ha nem tudja, mire képes a kocsija, korábban sok esetben még a szakmabelieknek is fejtörést okozott, hogy az egyes gépi megoldásokat hova lehet sorolni. Szerencsére tiszta vizet öntött a pohárba az SAE J3016 nevű szabvány, melyet 2014-ben mutattak be és elfogadottá vált szerte a világon. Ebben 5+1, egymásra épülő, tudásban egymás felett álló szinteken határozzák meg az önvezetés fokozatait a teljesen emberi kontrolltól kezdve az emberi beavatkozás nélküli önvezetésig.
A lépések a sor alsó három szintjén, pontosabban a 0., az 1. és a 2. szinten elhanyagolhatóak abból a szempontból, hogy a sofőrülésben ülő embernek folyamatosan dolga van. Minden esetben ő vezet, akkor is, ha a vezetőtámogató szolgáltatások aktívak, függetlenül attól, hogy kell-e kormányoznia vagy hogy a pedálon van-e a lába.
A 0., az 1. és a 2. vezetésautomatizálási szint közötti különbséget az jelenti, hogy milyen vezetőtámogató szolgáltatások állnak az ember rendelkezésére. A 0. szintű segítségek csak figyelmeztetésre, illetve pillanatnyi segítségre alkalmasak. Jó példa erre a Dacia Jogger automatikus vészfékező rendszere és holttérérzékelője, de az olyan sávelhagyásra figyelmeztető rendszerek is ide tartoznak, amilyet például a Citroën C3 Aircrossban találhatunk.

Az 1. és 2. szint között csak kicsi a különbség. Itt a funkciók már aktívabban beleszólnak az autó viselkedésébe: az 1. szinten vagy csak kormányzási, vagy csak fékezési/gyorsítási támogatást képes nyújtani az autó a sofőrjének, míg a 2. szinten egyszerre mindkettő funkcióban tud segíteni a kocsi.

Második szinten áll a vezetésautomatizálásban az új, elektromos Renault Mégane, a Hyundai Kona, illetve a Ford Focus legújabb generációja is, köszönhetően a sávban tartó rendszernek, illetve adaptív tempomatnak. Az autók mindkét rendszert egyszerre tudják kezelni, azaz változtatnak sebességükön és beleszólnak az irányításba is, ha szükséges, pl. ha az autópályán 110-es sebességnél 130-ra állítjuk a tempomatot és a vészsáv felé sodródunk. A jármű önállóan gyorsítani kezd a beállított sebességig, ha nincs előttük akadály, és korrigál, azaz visszatereli az autót a sáv közepére, illetve követi az autópálya kanyarjait is.
Az említett rendszerekhez kapcsolódhatnak más, az extralistákon feltűnő tételek is. Ilyen például a táblafelismerő, amely mindaddig mutatja az aktuális sebességkorlátozást, amíg másik azt felül nem írja. A látottak alapján az autó vissza is lassíthat, hogy ne lépje át a sebességhatárokat. Már az 1. szinten is megjelenhet ez extraként, de abban az esetben nincs semmilyen kormányzási segítség autónkban. A 2. szinten olyan vezetéssegítő rendszerek jöhetnek be, mint a parkolóasszisztens, mely szintén megtalálható a Ford Focusban. Ekkor az autó képes önállóan bekormányozni a parkolóhelyre önmagát.
Fontos kiemelni ezeknél a szinteknél, hogy az autó ugyan képes úgy közlekedni, hogy a sofőrnek hozzá sem kell érnie a pedálokhoz és a kormányhoz, attól még minden felelősség azé, aki a bal egyben ül. Nem véletlen, hogy például elengedett kormány esetén az autók rá-rászólnak a vezetőre, hogy fogja meg a volánt, és a kereszteződésekben a teljes megállásra is képes autók nem indulnak újra, csak akkor, ha az ember a gázra lép.
Jelenleg az útjainkon 2. szintű vezetéssegítő rendszerekkel szerelt autók közlekedhetnek korlátozás nélkül. Ez jelenti a hétköznapi ember számára elérhető csúcstechnológiát is: tesztek zajlanak már ennél magasabb automatizálási szintű járművekkel is lezárt, illetve gyérebb forgalmú területeken, városokban, például az Egyesült Államokban, de ez akkora ugrást jelent mind technológiailag, mind az emberi felfogásban, amire még nem állunk készen.
Fontos kiemelni ezeknél a szinteknél, hogy az autó ugyan képes úgy közlekedni, hogy a sofőrnek hozzá sem kell érnie a pedálokhoz és a kormányhoz, attól még minden felelősség azé, aki a bal egyben ül. Nem véletlen, hogy például elengedett kormány esetén az autók rá-rászólnak a vezetőre, hogy fogja meg a volánt, és a kereszteződésekben a teljes megállásra is képes autók nem indulnak újra, csak akkor, ha az ember a gázra lép.
Jelenleg az útjainkon 2. szintű vezetéssegítő rendszerekkel szerelt autók közlekedhetnek korlátozás nélkül. Ez jelenti a hétköznapi ember számára elérhető csúcstechnológiát is: tesztek zajlanak már ennél magasabb automatizálási szintű járművekkel is lezárt, illetve gyérebb forgalmú területeken, városokban, például az Egyesült Államokban, de ez akkora ugrást jelent mind technológiailag, mind az emberi felfogásban, amire még nem állunk készen.
Mitől működhet mindez egyáltalán?
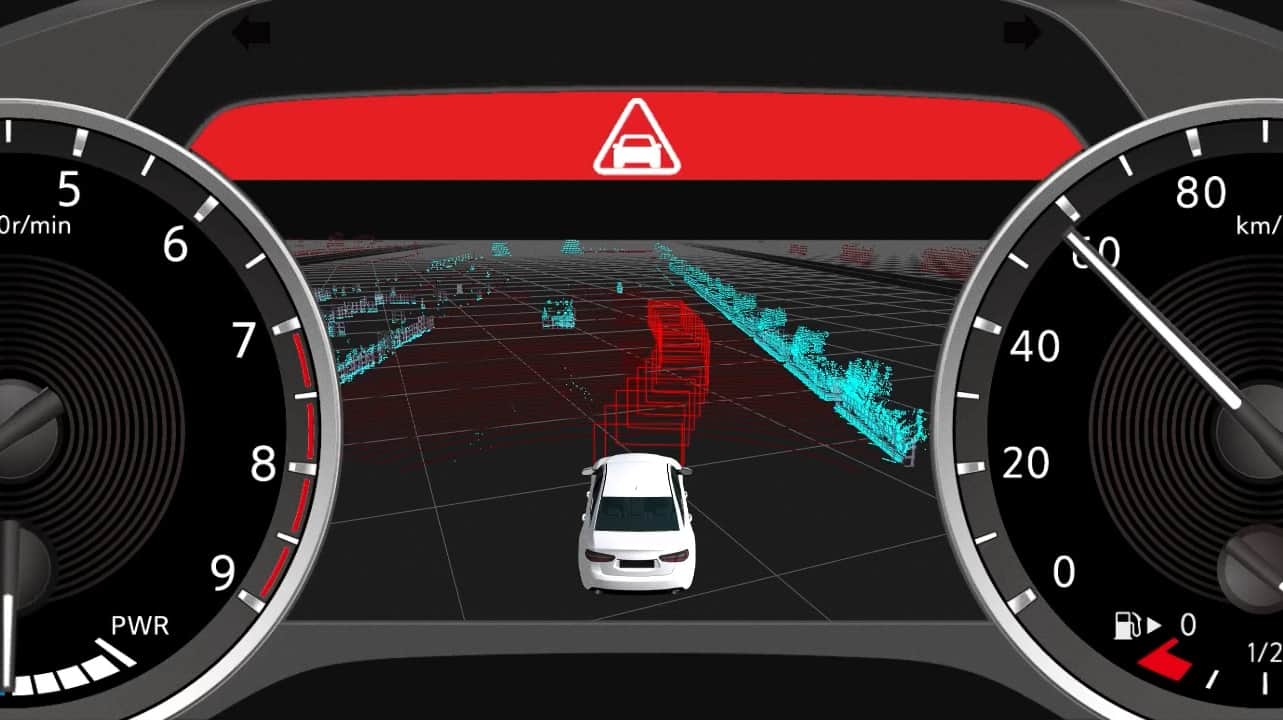
Az emberi sofőrök vezetés közben érzékszerveikre támaszkodnak. Nincs ez másképp a jelenlegi vezetéstámogató rendszerek esetében sem. Az autók elsősorban szintén a “látásukra” támaszkodnak, csak szemek helyett kamerákat használnak, ezeket térérzékelő eszközök egészítenek ki, melyek mélységet adnak a képnek – sőt, a radarok önmagukban is képesek a távolságok érzékelésére, mindenféle kamerakép nélkül.
Ezekből az eszközökből kétféle különböztethető meg. Az egyik eszközcsoport az ultrahangtartományban, kb. 40 kHz-es frekvenciával dolgozik, melynek segítségével a szenzor körüli kb. 80 cm-es távolságig képes érzékelni környezetét. Ilyenekből áll össze egy tolatóradar rendszere, melyet az alacsony frekvencia miatt nem is lehetne hivatalosan radarnak nevezni. A radar megnevezés a mikrohullámú frekvenciatartományban (kb. 24 GHz) működő eszközök sajátja, ezek akár a 80 méterrel távolabbi tereptárgyakat is fel tudnak térképezni. Emiatt lehet autóinkban adaptív tempomat vagy keresztforgalom-figyelő rendszer is. Van a radarnár modernebb technológia is, mégpedig a lidar, mely ugyanúgy távolságérzékelésre szolgál, csak hanghullámok helyett lézert használ, emiatt pontosabb a rendszer.
A jövő akár még ennél is többet hozhat: a felsoroltak mellett képbe jöhetnek az olyan kommunikációs rendszerek, melyek közvetlen kapcsolatot teremtenek a forgalomban lévő autók között, akár élő pozíciós és sebességi adatokkal. Ezek segítségével az önvezető autók útvonaltervezése is javulhat, emellett biztonságosabbá válhat a közlekedés.
Ezekből az eszközökből kétféle különböztethető meg. Az egyik eszközcsoport az ultrahangtartományban, kb. 40 kHz-es frekvenciával dolgozik, melynek segítségével a szenzor körüli kb. 80 cm-es távolságig képes érzékelni környezetét. Ilyenekből áll össze egy tolatóradar rendszere, melyet az alacsony frekvencia miatt nem is lehetne hivatalosan radarnak nevezni. A radar megnevezés a mikrohullámú frekvenciatartományban (kb. 24 GHz) működő eszközök sajátja, ezek akár a 80 méterrel távolabbi tereptárgyakat is fel tudnak térképezni. Emiatt lehet autóinkban adaptív tempomat vagy keresztforgalom-figyelő rendszer is. Van a radarnár modernebb technológia is, mégpedig a lidar, mely ugyanúgy távolságérzékelésre szolgál, csak hanghullámok helyett lézert használ, emiatt pontosabb a rendszer.
A jövő akár még ennél is többet hozhat: a felsoroltak mellett képbe jöhetnek az olyan kommunikációs rendszerek, melyek közvetlen kapcsolatot teremtenek a forgalomban lévő autók között, akár élő pozíciós és sebességi adatokkal. Ezek segítségével az önvezető autók útvonaltervezése is javulhat, emellett biztonságosabbá válhat a közlekedés.
A 3. szint az első, ahol elkezdhetünk igazi önvezetésről beszélni – feltéve, ha adottak ehhez a körülmények. Ilyenkor az autó dönt arról – minden tényező figyelembevételével –, hogy képes-e az önálló vezetésre. A sofőrnek készenlétben kell állnia a kormány és a pedálok mögött, ugyanis menet közben változhatnak a viszonyok, és a szolgáltatáscsomag kérheti, hogy vegye át az irányítást az ember. Az SAE szabvány szerint ezen a szinten már nem kell a dugóban idegeskednünk, a feladatot megállásokkal és elindulásokkal együtt önállóan megoldja a jármű, de tud előzni és kikerülni is. Nyugodtan lehet nyomkodni a telefont.
Számos, az önvezető autókról napvilágot látott vízióban, tanulmányban olyan formatervekkel találkozhatunk, ahol nincs is kormány és pedálsor az autókban. Erre a 4. szinten nyílik először elméleti lehetőség. Ezek már olyan járművek lesznek, melyek mindent megoldanak az ember helyett, viszont csak zárt, körülhatárolt területeken. Ebbe a kategóriába tartoznak a már tesztelés alatt lévő robottaxik, melyek egy bizonyos városban vagy városrészben dolgoznak, melyet alaposan „megtanultak”, viszont azon kívül nehezen vagy egyáltalán nem boldogulnának.
A teljes önvezetés, az 5. szint csak annyival több a negyediknél, hogy eltűnnek a területhatárok, az autók képesek lesznek mindenhol teljesen önállóan közlekedni. Ekkorra már várhatóan a saját szenzoraik által szerzett adatok mellett a környezetükkel és a többi járművel is folyamatosan kommunikálnak az autók.
A teljes önvezetés, az 5. szint csak annyival több a negyediknél, hogy eltűnnek a területhatárok, az autók képesek lesznek mindenhol teljesen önállóan közlekedni. Ekkorra már várhatóan a saját szenzoraik által szerzett adatok mellett a környezetükkel és a többi járművel is folyamatosan kommunikálnak az autók.

Örüljünk vagy szomorkodjunk, ha a gép vezet helyettünk?
Számos területen bebizonyosodott már, hogy a gépek pontosabb, jobb munkát végeznek, mint az emberek. Ide sorolható az autóvezetés is, ahol a technológiai vívmányok, a vezetéstámogató rendszerek már eddig is sokat segítettek, és rengeteg balesettől mentették meg az utazókat. Az irány tehát egyértelmű: ha kiiktatjuk az emberi tényezőt, biztonságosabbá válik a közúti közlekedés a jövőben.

Addig is azonban nagyon rögös út vár a fejlesztőkre és felhasználókra is. Az emberi viselkedés, valamint a számtalan ismeretlenes, organikus közlekedés nehezen kiszámítható, és bonyolultsága miatt valószínűleg jó darabig az is marad.
Elképesztő számítási kapacitásuk ellenére a számítógépeket nem lehet előre mindenre felkészíteni, programozni. Nincs intuíciójuk, emberi ösztönük, empátiájuk. Emellett az etikai és jogi kérdések is komoly akadályt jelentenek, főként akkor, amikor a forgalomban vegyesen szerepelnek majd az önvezető autók és az ember által irányítottak.
Elképesztő számítási kapacitásuk ellenére a számítógépeket nem lehet előre mindenre felkészíteni, programozni. Nincs intuíciójuk, emberi ösztönük, empátiájuk. Emellett az etikai és jogi kérdések is komoly akadályt jelentenek, főként akkor, amikor a forgalomban vegyesen szerepelnek majd az önvezető autók és az ember által irányítottak.
Fontos azonban leszögezni, hogy sokan nem feltétlenül csak közlekedési eszközként tekintünk az autóra, hanem szórakozási formaként is. Egy jó autó vezetése élmény, amit hiba lenne teljesen megvonni az emberiség erre vevő részétől, de sok víz lefolyik még a Dunán addig, mire ez valódi problémaként merül fel.